Since it's common to run many filesystems under the QNX Neutrino RTOS, they have been designed as a family of drivers and shared libraries to maximize code reuse. This means the cost of adding an additional filesystem is typically smaller than might otherwise be expected.
Once an initial filesystem is running, the incremental memory cost for additional filesystems is minimal, since only the code to implement the new filesystem protocol would be added to the system.
The various filesystems are layered as follows:
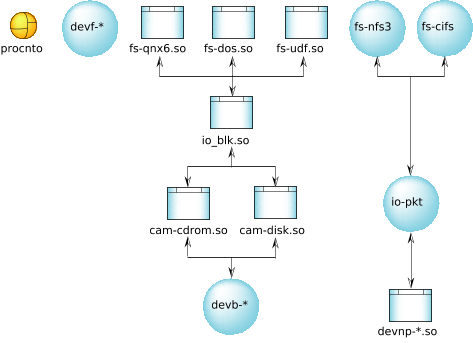 Figure 1. QNX Neutrino filesystem layering.
Figure 1. QNX Neutrino filesystem layering.As shown in this diagram, the filesystems and io-blk are implemented as shared libraries (essentially passive blocks of code resident in memory), while the devb-* driver is the executing process that calls into the libraries. In operation, the driver process starts first and invokes the block-level shared library (io-blk.so). The filesystem shared libraries may be dynamically loaded later to provide filesystem interfaces and services.
A “filesystem” shared library implements a filesystem protocol or “personality” on a set of blocks on a physical disk device. The filesystems aren't built into the OS kernel; rather, they're dynamic entities that can be loaded or unloaded on demand.
For example, a removable storage device (removable cartridge disk, etc.) may be inserted at any time, with any of a number of filesystems stored on it. While the hardware the driver interfaces to is unlikely to change dynamically, the on-disk data structure could vary widely. The dynamic nature of the filesystem copes with this very naturally.